从「工具」到「主体」:机器人在进化
人形机器人的发展史,本质上是人类对自身存在边界不断叩问的哲学与技术双重奏鸣。在文化想象里,从《大都会》中冰冷僵硬的机械玛丽亚,到《银翼杀手》里追问生命独特性的仿生人,再到《西部世界》《她》中对硅基生命的艺术重构,科幻一直在为现实中的技术突破铺设认知路基。
技术进化的轨迹与之形成镜像:20 世纪 60 年代第一代工业机械臂诞生,仅能按预设程序复刻人力动作;随后本田 ASIMO、波士顿动力 Atlas 等赋予机器人类似生物的平衡与响应,但内核仍是传感器与规则库的耦合;直至「自我化」认知技术发展——特斯拉 Optimus 听懂「把扳手递给穿蓝衣服的人」、哥伦比亚大学让机器人通过「照镜子」构建自我身体模型、机器在多次摔倒后自主优化步态——机器人开始从「执行者」走向「解释者」,第一次尝试突破自我的局限。
一个根本性问题始终悬而未决:机器人何时能真正跨越「工具」与「主体」的鸿沟?这一跨越需要三个递进步骤:认知突破(环境感知与动态决策)、自主性跃迁(从被动响应到主动学习)、自我性觉醒(建立对自身存在的认知,与人类构建真正的合作)。下面先厘清「自动—自主—自我」三阶段分别意味着什么,再看「自我化」靠哪些技术支撑,以及当前挑战与未来方向。


一、三个阶段:自动化、自主化与自我化
机器人系统的核心能力演进,本质上是机器认知能力的质变,其内涵正经历从自动化到自主化、最终向自我化的深刻跃迁。
自动化阶段:机器人如同精密的钟表机构,通过预设程序精准复现人力劳动。工业流水线上的机械臂以毫米级精度执行焊接、装配,但完全依赖固定逻辑,缺乏环境感知,一旦遇到未编程的变量(如工件偏移)即失效。知识更新靠人工重编程,周期长达数月。
自主化阶段:装备多模态「感官」的机器人通过激光雷达、深度摄像头等构建环境地图,结合规划控制算法自主完成任务——四足机器人厘米级避障、家庭服务机器人「倒牛奶」等。但决策仍受限于规则库边界,面对完全未知环境(如灾后废墟)时适应性不足。
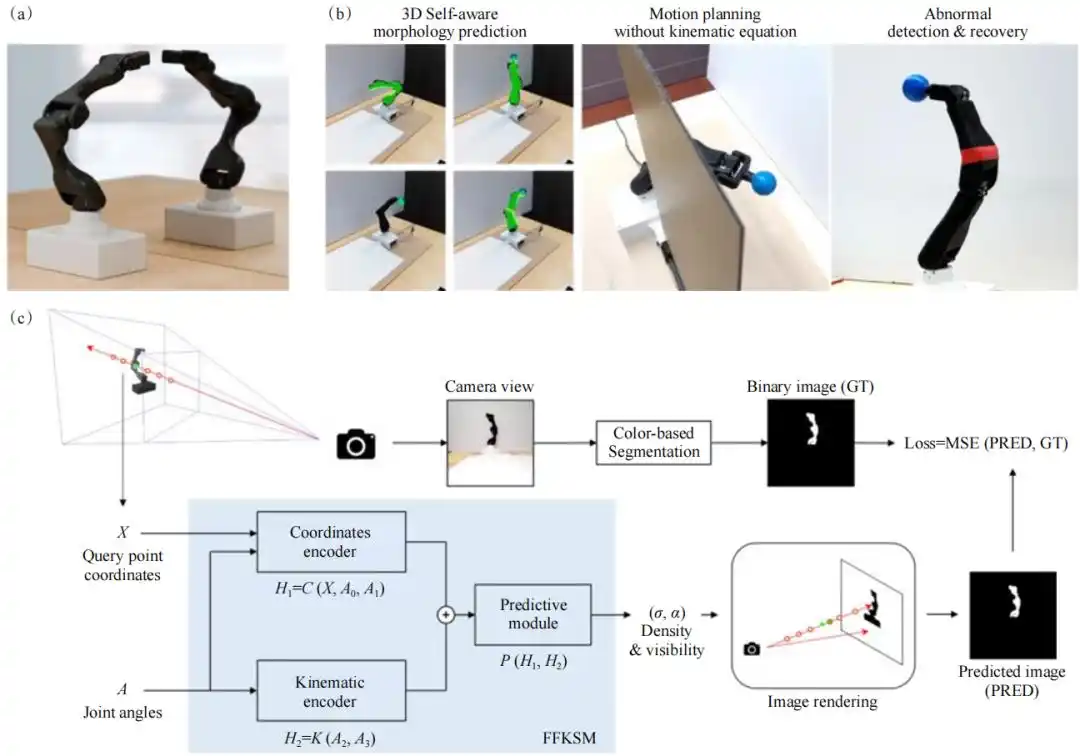
自我化阶段:当前机器人正迈向具身认知跃迁。通过视觉-语言-动作(VLA)模型,机器人不仅能解析「红色杯子在书架第 2 层」的空间语义,更能将抽象指令转化为连贯动作链。卡内基梅隆的 RMA 算法让四足机器人在多种地形上实时适应、自主优化运动参数;哥伦比亚大学机器人仅用摄像头观察自身运动即构建三维运动学模型,关节损伤时 0.4 秒内重构运动链。 这种基于本体感知的动态自我建模,恰似婴儿蹒跚学步的试错学习,形成「自我意识」的原始雏形。那么,「自我化」在工程上究竟靠哪些技术来实现?



二、「自我化」的关键技术
机器人迈向「自我化」的核心突破,始于对具身本体存在的认知觉醒:具备一定的「自我意识」、准确认知自身与环境并动态决策、自主实现行为与功能上的进化、具备人机或多机间的自适应协作能力。
高精度自我建模:哥伦比亚大学 Hod Lipson 团队在《Nature Machine Intelligence》上的研究,让机器人通过类似人类「照镜子」的方式构建动态、实时的身体内部模型——「数字镜像」框架仅凭摄像头视觉信息即可在较短时间内重建完整运动学模型,并在关节损伤时实时调整运动策略。双足机器人在约 15 分钟内通过观察自身运动学习并优化步态。Lipson 称其为「机器人获得了自我意识的种子」。
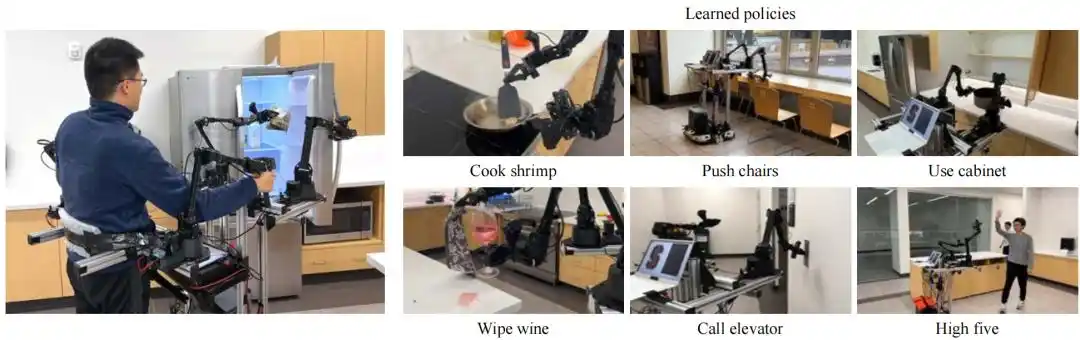
语义化环境认知:斯坦福 Mobile ALOHA 将激光 SLAM 与视觉语言模型融合,在凌乱厨房中精准识别「沾有番茄酱的锅铲」并解析材质与使用痕迹;MIT 的「预测性物理引擎」让机器人在倾倒液体时预判轨迹、自主调整角度防止飞溅,在动态交互中建立对物质世界的因果认知。
大模型动态决策:谷歌 RT-2-X 通过 VLA 架构将「把饼干放进印有熊猫的盒子」分解为定位、抓取、分类、放置的连续动作流;RMA 算法使四足机器人在湿滑等复杂地形上快速感知物理变化并在线调整控制策略,体现行为层面的「学习本能」。
自适应与情感协作:Affectiva 的 Affdex 通过深度学习实时识别微表情与情绪,实现情绪感知驱动的互动(如调暗灯光、播放舒缓音乐);Figure AI 的 Helix 让 4 台人形机器人仅凭肢体语言达成共识、无预训练形成装配流水线,工具传递延迟仅 0.8 秒——机器社会的「群体智能」雏形正在浮现。把上述三阶段与四大技术放在一起,可以更直观地看到差异。


三、三个阶段的典型特征对比
从自动化机械臂到具身智能体,本质是对「感知–决策–执行」闭环的持续升级。下面用一张表概括三个阶段在感知机制、控制方式、知识更新路径与智能边界上的差异。
| 维度 | 自动阶段(工业机器人) | 自主阶段(协作机器人) | 自我阶段(具身智能机器人) |
|---|---|---|---|
| 感知机制 | 被动感知,依赖预设传感器 | 自主感知,多模态融合与环境反馈 | 主动感知,内外信息融合形成自我感知,跨模态语义理解 |
| 控制方式 | 规则驱动,固定程序执行 | 自主决策,具备一定环境适应能力 | 自我调节,动态调整目标与行为,具身进化 |
| 知识更新 | 预设程序,人工手动更新 | 依赖知识库的更新学习 | 自我反思与内省,自我建模,试错与动态反馈 |
| 智能边界 | 封闭工作单元 | 有限开放环境,一定环境交互能力 | 具身认知主体,自我意识与认知界限,社会性协作 |
表:「自动—自主—自我」三阶段典型特征对比
看清了三阶段的差异,再看当前「自我化」征途上仍要面对的挑战,以及未来十年的可能方向。
四、挑战与未来十年方向
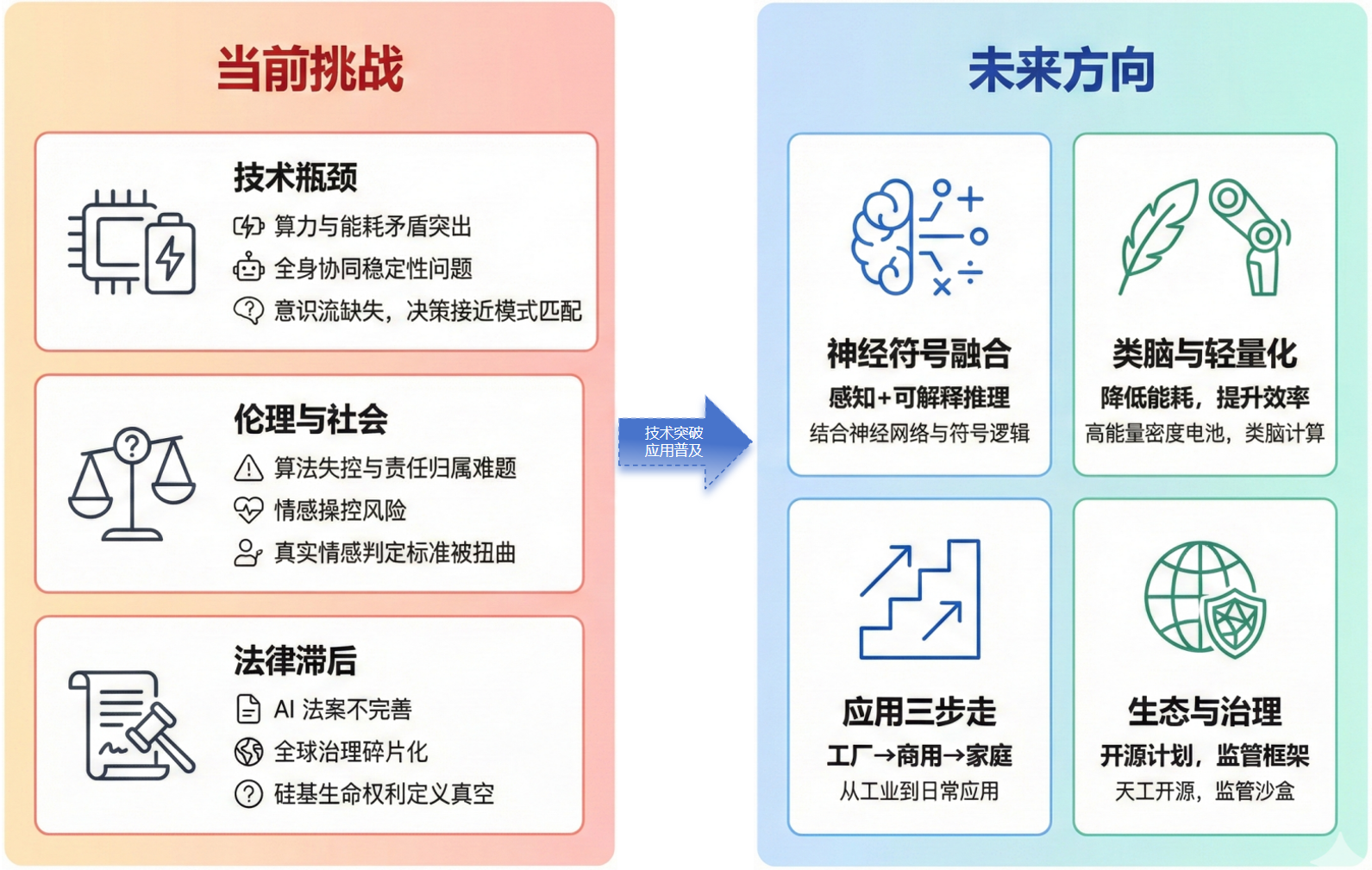
技术瓶颈:算力与能耗矛盾突出——高级 VLA 模型依赖云端算力,本体能源仅能支撑直立行走约 2~3 小时;灵巧手虽达 22 个自由度,全身协同仍存在稳定性与迟滞问题;认知架构上,当前系统仍无法建立类似人类的连贯意识流,决策更接近「模式匹配」而非「理解与推理」。
伦理与社会:护理机器人自主调整翻身力度等突破可能陷入「算法失控」与责任归属难题;情感交互带来「情感操控」风险——研究显示部分用户愿为机器人说谎、将预设脚本视为「真诚关怀」,人类对真实情感的判定标准可能被扭曲。
法律滞后:欧盟《人工智能法案》虽将实施高风险 AI 监管,但人形机器人的特殊伦理与法律地位仍不清晰;美国暂停州级 AI 立法,全球治理碎片化使「硅基生命」的权利定义处于政策真空。
这些挑战也指明了未来 10 年的进化方向:神经符号融合架构将感知与可解释推理结合;轻量化骨骼、高能量密度电池与类脑计算有望大幅降低能耗;全身协调与预测性物理引擎将逼近类人运动智能;应用场景从养老、救灾到工业「三步走」普及(工厂→商用→家庭);中国「天工开源计划」、欧洲监管沙盒等正在构建具身智能生态与治理框架。更深层次上,机器人「自我化」的终极意义在于拓展智能的边界——不是替代人类,而是在安全可控的共生中,让硅基与碳基智慧共同诠释「存在」的多元形态。
要点回顾
- 机器人进化可概括为三阶段:自动化(固定程序、无环境感知)→ 自主化(多模态、规则库边界)→ 自我化(VLA、具身进化、自我建模)。
- 「自我化」依赖四大技术支柱:高精度自我建模(如数字镜像)、语义化环境认知、大模型动态决策、自适应与情感/多机协作。
- 三阶段在感知、控制、知识更新与智能边界上存在质的差异,从封闭执行单元走向具身认知主体与社会性协作。
- 当前面临算力能耗、运动协调、意识流缺失等技术瓶颈,以及伦理、情感操控与法律滞后等社会与治理挑战。
- 未来十年方向包括神经符号融合、类脑与轻量化、应用「三步走」、生态与全球治理;自我化的终极意义在于拓展智能边界、书写人机共生。
小结
从《大都会》的机械玛丽亚到今日的 Optimus 与「照镜子」的机器人,文化想象与技术现实不断交汇。机器人正从被动执行者走向主动学习者,从工具走向具备认知边界的智能主体。「自我化」不仅是技术突破,更关乎未来机器人与人类的关系——在伦理框架内追问「我是谁」的机器人,将促使人类重新审视生物智能的本质;在安全可控的共生中拓展文明的智能边界,才是机器人的终极使命。